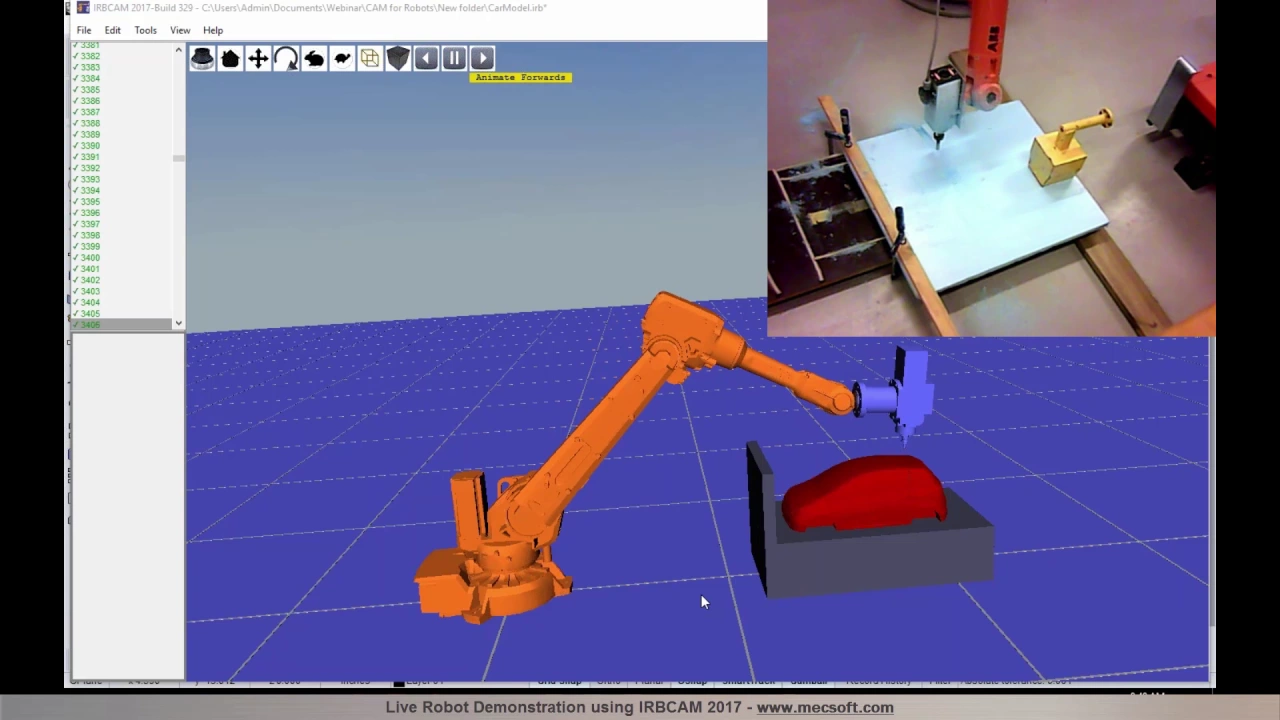
We work with a company called IRBCAM in Norway that provides a solution to convert G-code generated from any of MecSoft’s products to robot language code. IRBCAM is a standalone product that converts NC-code (G-code or APT-CLS format) to executable robot motion code. It takes as input a NC code file and the user has the ability to select a robot of choice from a built in library of over 250 commercially available robots and convert the NC code to the robot motion code that the selected robot can execute. The robot cell can be modeled and collision detection can also be performed to make sure the output code is collision free.